Definition and Convergence of Z-Transform and Region of Convergence
Introduction to Z-Transform
Consider a discrete time LTI system with impulse response h(n) and input as a complex exponential signal of form zn, then the response of the system y(n) is represented as:
y(n) = H(z) . zn
where, H(z) = ∑n = -∞ to ∞ h(n) . z-n
If |z| is not restricted to unity, then the summation is known as z-transform of h(n).
Hence, the z-transform of a discrete time signal x(n) is given as:
X(z) = ∑n = -∞ to ∞ x(n) . z-n
- Z-transform is an infinite power series which exists only for those values of z for which the series converges.
- The region of convergence (ROC) of X(z) is the set of values of z for which X(z) converges to a finite value.
- Z-transform transforms the time domain signal x(n) into its complex plane representation X(z).
Similarly, as a complex number; [ z = r e jw ]
X(z) = ∑n = -∞ to ∞ x(n) . (rejw)-n
= ∑n = -∞ to ∞ { x(n) . r-n} e-jwn
Single Sided Z-Transform
- A single sided Z-transform is defined as:
X(z) = ∑n = 0 to ∞ x(n) . z-n
Double Sided Z-Transform
- A double sided Z-transform is defined as:
X(z) = ∑n = -∞ to ∞ x(n) . z-n
Region of Convergence
- The set of values of z in z-plane for which magnitude of X(z) converges to a finite value is called region of convergence.
- We know, Z-transform is expressed as:
X(z) = ∑n = -∞ to ∞ x(n) . z-n
- In complex form:
X(z) = ∑n = -∞ to ∞ { x(n) . r-n} e-jwn
The complex form gives the discrete time fourier transform of signal { x(n) r-n }
Now, if r = 1, then |z| = 1.
In this case, X(z) reduces to its Fourier Transform.
The equation 2 will converge if { x(n) r-n } is absolutely summable.
i.e. ∑n = -∞ to ∞ | x(n) . r-n | < ∞
For x(n) to be finite, magnitude of X(z) must also be finite.
Hence, convergence of ∑n = -∞ to ∞ | x(n) . r-n | guarantees convergence of
X(z) = ∑n = 0 to ∞ { x(n) . z-n }
Therefore, the condition for z-transform X(z) to be finite is |z| > 1.
- ROC is the area outside the unit circle in Z-plane.
- Let us consider z-transfer of a discrete time unit step function u(n)
i.e. X(z) = z / (z-1)
It has a zero at z = 0 and a pole at z = 1. Hence, the region of convergence is |z| > 1.
Properties of ROC
1. ROC of X(z) consists of a circle in z-plane centered about the origin.
2. It does not contain any pole.
3. The z-transform X(z) converges uniformly if and only if ROC of z-transform X(z) includes the unit circle.
4. If x(n) is of finite duration, ROC will be entire z-plane except z = 0 and z = ∞.
5. If x(n) is right sided, ROC will not include ∞.
6. If x(n) is left sided, ROC will not include zero.
7. If x(n) is two sided and if circle |z| = ro is in ROC, then ROC will consist of ring in z-plane that includes circle |z| = ro.
8. If X(z) is rational, ROC will extend to infinity.
9. If x(n) is causal, ROC will include z = ∞.
10. If x(n) is anti-causal, ROC will include z = 0.
Properties of Z Transform
Linearity
- The z-transform of a linear combination of discrete time signal is equal to the sum of linear combination of z-transforms.
- If x1(n) -----> X1(z) and x2(n) -----> X2(z), then:
x(n) = a1 x1(n) = a2 x2(n) ----------> X(z) = a1 X1(z) + a2 X2(z)
Time Reversal
- If x(n) ----> X(z) with ROC r1 < |z| < r2, then:
x(-n) ---> X(z-1) with ROC 1/r2 < |z| < 1/r1
Time Shifting
- If x(n) ---> X(z), then x(n-no) ---> z-no X(z)
- ROC will be same except for z = 0 if no > 0 and z = ∞ if no < 0.
Inverse Z Transform by Long Division and Partial Fraction Method
- Inverse z-transform is defined as the process of conversion from z-domain to time domain.
- The different methods are as follows:
1. Partial fraction expansion
2. Power series expansion by long division
Power Series Expansion by Long Division
1. Expand X(z) into a power series of the form:
X(z) = ∑n = -∞ to ∞ cn z-n
2. x[n] = cn for all n.
3. If X(z) is rational, the expansion is obtained by long division.
4. When ROC of X(z) is such that x[n] is to be a causal signal, we arrange the term in numerator and denominator such that we get expansion in negative powers of z.
5. For anti-causal X(z), we expect expansion in positive powers of z.
Q) Find inverse z-transform for X(z) = 1 / (1-1.5z<sup>-1</sup>+0.5z<sup>-2</sup>).
1. If ROC : |z| > 1
Looking at ROC, the signal must be a causal signal.
So,
X(z) = 1 / [ (1 - 3/2 z-1 + 1/2 z-2) ]
= 1 + 3/2 z-1 + 7/4 z-2 + 15/8 z-3 + 31/16 z-4 + .....................
By comparing:
x(n) = { 1, 3/2, 7/4, 15/8, 31/16, ............. }
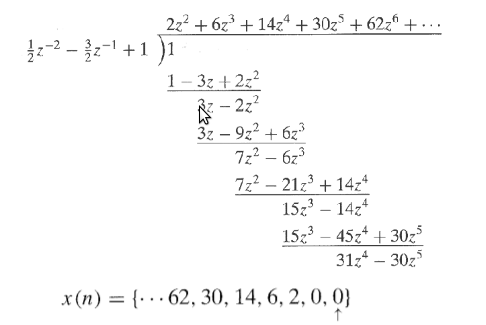
2. If ROC : |z| < 0.5
Looking at ROC, the signal must be an anti-causal signal. So,
Partial Fraction Expansion
1. Express function X(z) as a linear combination X(z) = a1 X1(z) + a2 X2(z) + ................ + ak Xk(z)
where, X1(z), X2(z), ................... are standard functions whose inverse are known.
2. By linearity property, x(n) = a1 x1(n) + a2 x2(n) ...................... + ak xk(n)
3. It is used when X(z) is a rational fraction of form X(z) = B(z) / A(z)
B(z) = b0 + b1 z-1 + b2 z-2 + ............... + bM z-M
A(z) = 1 + a1 z-1 + a2 z-2 + ............... + aN z-N
- A rational fraction is said to be proper if M < N.
- If it is improper ( M > N ), it should be converted to proper by dividing numerator by denominator resulting in a polynomial and a proper fraction.
4. To find the partial fraction expansion, the poles are identified. (Say p1, p2, ....... pn)
5. If poles are distinct and real, expansion will be of form:
X(z) / z = A1 / (z-p1) + A2 / (z-p2) + ................ + An / (z-pn)

Ⓒ Copyright ESign Technology 2019. A Product of ESign Technology. All Rights Reserved.