Scalar and Vector
The quantities that can be presented completely by the magnitude only are called scalars. Example : temperature, mass, density, electric potential and so on.
The quantities that require both magnitude as well as direction for their complete significance are called vectors. Example : velocity, electric field intensity, force and so on.
Vector Algebra
Assume that A and B are two vector quantities and r and s are two constants.
1. Addition:
A + B = B + A
A + (B + C) = (A + B) + C
2. Subtraction:
A + (- B) = A - B
3. Multiplication:
(r + s) (A + B) = r A + r B + s A + s B
4. Division:
(1/r) (A + B) = A / r + B / r
Scalar Field and Vector Field
Scalar field is the field in which each point in space can be represented by scalar quantities. For example : temperature field i.e. T = e ^ (xyz / 20)
Vector field is the field in which each point in space can be represented by the vector quantities. For example : velocity field.
Dot Product
- Let us consider A and B be two vectors, then the dot product of these two vectors is represented as:
A . B = |A| * |B| * cosθ
where, θ represents the smaller angle between A and B.
- It is considered that: A . B = B . A
- Example of dot product is:
1. Work done by a force is given by:
W = F . L = F * L * cosθ = ∫ F . dL
- For A = A(x) a(x) + A(y) a(y) + A(z) a(z), where a(x), a(y) and a(z) are the unit vector components of A vector and A(x), A(y) and A(z) are constants. Similarly, for B = B(x) b(x) + B(y) b(y) + B(z) b(z)
A . B = A(x) B(x) + A(y) B(y) + A(z) B(z)
- Dot product of similar unit vectors is 1, while of dissimilar unit vectors is 0.
i.e. a(x) . a(x) = a(y) . a(y) = a(z) . a(z) = 1
a(x) . a(y) = a(y) . a(z) = a(z) . a(x) = 0
Cross Product
- For the two vectors A and B, the cross product of these two vectors is given by:
A × B = |A| * |B| * sinθ * n^
- It is perpendicular to both the vectors.
- a(x) × a(y) = a(z); a(y) × a(z) = a(x); a(z) × a(x) = a(y)
- a(y) × a(x) = -a(z); a(z) × a(y) = -a(x); a(x) × a(z) = -a(y)
- a(x) × a(x) = a(y) × a(y) = a(z) × a(z) = 0
- A × B != B × A
A × B = | a(x) a(y) a(z) |
| A(x) A(y) A(z) |
| B(x) B(y) B(z) |
Coordinate System
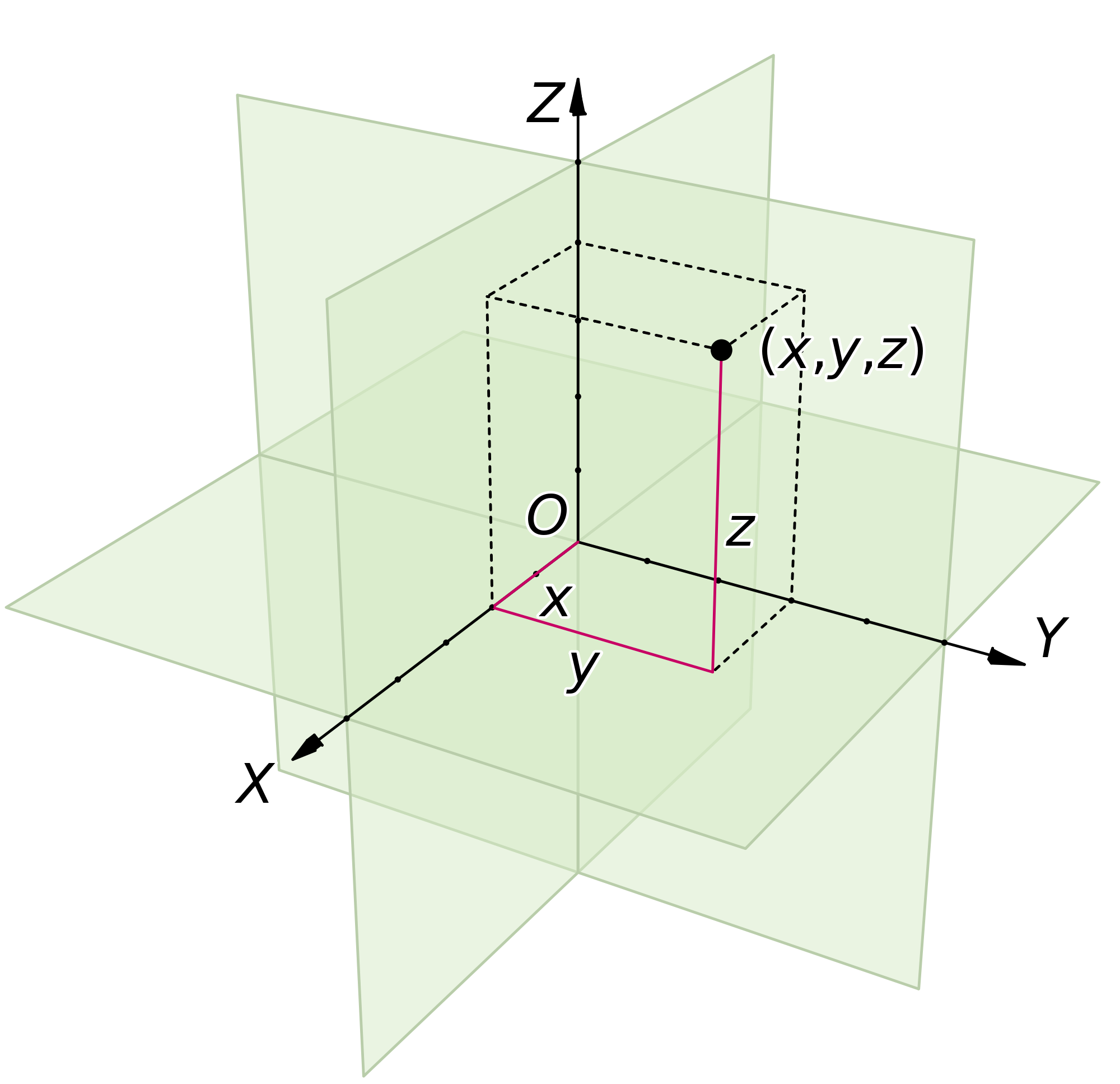
Rectangular Coordinate System
- It consists of three coordinate axes mutually perpendicular to each other.
- The axes are x, y and z axes.
- A point is located by its x, y and z coordinates.
- Any vector in rectangular or cartesian coordinate system can be represented by:
B = B(x) a(x) + B(y) a(y) + B(z) a(z)
where, a(x), a(y) and a(z) are the unit vectors along x, y and z axes respectively.
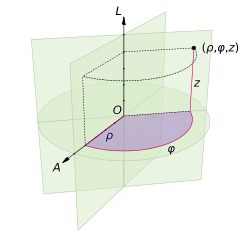
Circular Cylindrical Component System
- It is the 3 dimensional version of polar coordinate system.
- It consists of three planes; circular cylinder (p = constant), planes (z = constant and ϕ = constant)
- The unit vectors a(p), a(z) and a(ϕ) are mutually perpendicular to each other.
- a(p) is normal to cylindrical surface, a(ϕ) is normal to plane ϕ = constant and a(z) is normal to plane z = constant.
- For the two cylinders of radius p and p + dp, two radial planes at angles ϕ and ϕ + dϕ, two horizontal planes at elevation z and z + dϕ, can enclose a small volume.
The sides are of length dp, dz and pdϕ.
So, surface areas are pdϕdp, pdϕdz and dpdz.
The volume is pdpdϕdz.
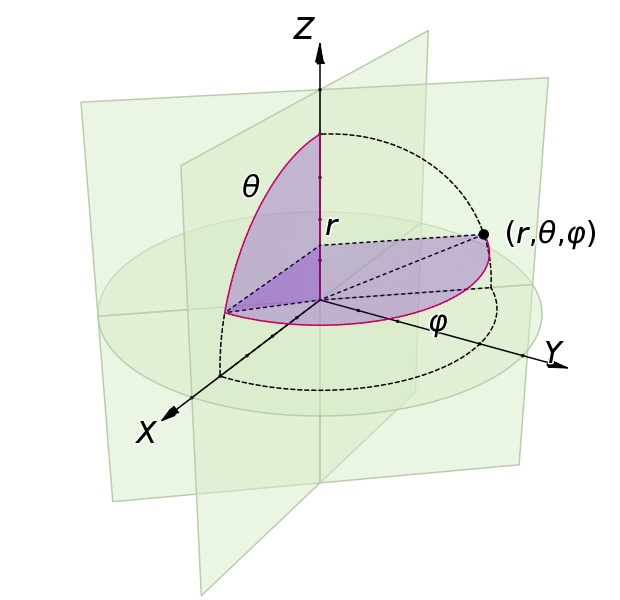
Spherical Coordinate System
- It consists of three mutually perpendicular surfaces (sphere; r = constant, cone; θ = constant, and plane; ϕ = constant)
- a(r), a(θ) and a(ϕ) are unit vectors.
- Differential Elements:
The lengths are dr, rdθ and rsinθdϕ
Rectangular and Cylindrical Coordinate Conversion
We know that:
p = √(x^2 + y^2)
ϕ = tan-1 (y / x)
Also,
x = p cosϕ
y = p sinϕ
The conversion table is shown in given table:
| a(p) | a(ϕ) | a(z) | |
| a(x) | cosϕ | - sinϕ | 0 |
| a(y) | sinϕ | cosϕ | 0 |
| a(z) | 0 | 0 | 1 |
Rectangular and Spherical Coordinate Conversion
We know:
r = √(x^2 + y^2 + z^2)
θ = cos-1 (z / (√(x^2 + y^2 + z^2)))
ϕ = tan-1 (y / x)
Also,
x = r sinθ cosϕ
y = r sinθ sinϕ
z = r cosθ
The conversion table is shown in given table:
| a(r) | a(θ) | a(ϕ) | |
| a(x) | sinθ cosϕ | cosθ cosϕ | - sinϕ |
| a(y) | sinθ sinϕ | cosθ sinϕ | cosϕ |
| a(z) | cosθ | -sinθ | 0 |
Numerical Problems of Coordinate System
1. Convert B = y a(x) - x a(y) + z a(z) into cylindrical coordinate system.
We have, B = y a(x) - x a(y) + z a(z)
In cylindrical system, let B = B(p) a(p) + B(ϕ) a(ϕ) + B(z) a(z)
Now, from the rectangular and cylindrical conversion table,
1. B(p) = B.a(p) = [y a(x) - x a(y) + z a(z)] . a(p)
= y a(x) . a(p) - x a(y) . a(p) + z a(z) . a(p)
= y cosϕ - x sinϕ
2. B(ϕ) = B.a(ϕ) = [y a(x) - x a(y) + z a(z)] . a(ϕ)
= y a(x) . a(ϕ) - x a(y) . a(ϕ) + z a(z) . a(ϕ)
= - y sinϕ - x cosϕ
3. B(z) = B.a(z) = z
So,
B = (y cosϕ - x sinϕ) a(p) - (y sinϕ + x cosϕ) a(ϕ) + z a(z)
Substituting value of x and y, we get:
B = (p sinϕ cosϕ - p cosϕ sinϕ) a(p) - (p (cosϕ)^2 + p (sinϕ)^2) a(ϕ) + z a(z)
= -pa(ϕ) + za(z)
2. Convert G = (xz / y) a(x) into spherical coordinate system.
Let in spherical coordinate, G = G(r) a(r) + G(θ) a(θ) + G(ϕ) a(ϕ)
Now,
G(r) = G. a(r) = (xz / y) a(x) . a(r) = xz/y sinθ cosϕ
G(θ) = G. a(θ) = (xz / y) a(x) . a(θ) = xz/y cosθ cosϕ
G(ϕ) = G. a(ϕ) = (xz / y) a(x) . a(ϕ) = - xz/y sinϕ
So,
G = xz/y sinθ cosϕ a(r) + xz/y cosθ cosϕ a(θ) - xz/y sinϕ a(ϕ)
Substituting for the value of x, y and z;
G = ( r cosθ cosϕ / sinϕ) * { sinθ cosϕ a(r) + cosθ cosϕ a(θ) - sinϕ a(ϕ) }
3. Transform to cylindrical coordinates: F = 10 a(x) - 8 a(y) + 6 a(z) at point P(10, -8, 6).
Let us consider in cylindrical coordinates: F = F(p) a(p) + F(ϕ) a(ϕ) + F(z) a(z)
So,
F(p) = [10 a(x) - 8 a(y) + 6 a(z)] . a(p) = 10 a(x) . a(p) - 8 a(y) . a(p) + 6 a(z) . a(p) = 10 cosϕ - 8 sinϕ
F(ϕ) = 10 a(x) . a(ϕ) - 8 a(y) . a(ϕ) + 6 a(z) . a(ϕ) = - 10 sinϕ - 8 cosϕ
F(z) = 6
Hence, F = (10 cosϕ - 8 sinϕ) a(p) - (10 sinϕ + 8 cosϕ) a(ϕ) + 6 a(z)
At point P(10, -8, 6):
p = √(x^2 + y^2) = 12.81
ϕ = tan-1 (y / x) = -38.66 degree
Now,
F = 12.81 a(p) + 6 a(z)
4. At point P(-3, -4, 5), express that vector that extends from P to Q(2, 0, -1) in spherical coordinates.
The vector that extends from P to Q can be expressed as vector PQ given by: PQ = 5 a(x) + 4 a(y) - 6 a(z)
In terms of spherical coordinates:
A(r) = 5 a(x) . a(r) + 4 a(y) . a(r) - 6 a(z) . a(r) = 5 sinθ cosϕ + 4 sinθ sinϕ - 6 cosθ
A(θ) = 5 a(x) . a(θ) + 4 a(y) . a(θ) - 6 a(z) . a(θ) = 5 cosθ cosϕ + 4 cosθ sinϕ + 6 sinθ
A(ϕ) = 5 a(x) . a(ϕ) + 4 a(y) . a(ϕ) - 6 a(z) . a(ϕ) = - 5 sinϕ + 4 cosϕ
Hence,
PQ = (5 sinθ cosϕ + 4 sinθ sinϕ - 6 cosθ) a(r) + (5 cosθ cosϕ + 4 cosθ sinϕ + 6 sinθ) a(θ) + (- 5 sinϕ + 4 cosϕ) a(ϕ)
- by SURAJ AWAL

Ⓒ Copyright ESign Technology 2019. A Product of ESign Technology. All Rights Reserved.